Timing & Constraints Journal... |
1.5i에서 VIRTEX CLKDLL의 TIMING
Keywords: Timing, CLKDLL, CLKDLLHF, Constraints Editor
Urgency: Standard
General Description: What are the issues associated with constraining
the paths of the various taps of the DLLs? In addition, how do TRCE and Timing
Analyzer handle constraints and the various taps of the DLL?
For more information about the CLKDLL implementation, refer
to the following documents.
XAPP132: Using the Virtex Delay-Locked Loop http://www.xilinx.com/apps/virtexapp.htm
Libraries Guide: http://toolbox.xilinx.com/docsan/data/alliance/lib/lib4_22.htm
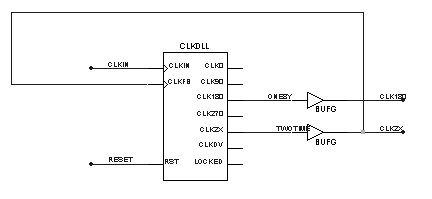
The CLKDLL provides many powerful features that aid in the design of high-speed digital circuits. Associated with these features is the ability of the Xilinx tool set to perform timing based place and route. PERIOD, OFFSET, and FROM TO constraints will be illustrated in detail. Figure 1 contains one implementation of the CLKDLL.
Figure 1. CLKDLL Implementation.
A PERIOD constraint can be applied to the DLL in figure 1 in the following ways. Using the pad net name method:
NET "PADCLKIN" PERIOD = 30 ns;
Using the DLL output net name method:
NET "ZERO" PERIOD = 30 ns;
Or
NET "ZERO" TNM_NET = "ZERO";
TIMESPEC TS_ZERO
= PERIOD "ZERO" 30 ns;
Note: TNM_NET does not propagate through the CLKDLL.
Both methods will constrain the net ZERO the same way. However the way that TRCE/TA reports the two constraints is different. An example of timing report for each method will be included below.
Using the pad net name method:
=======================================================================
Timing constraint: NET "PADCLKIN"
PERIOD = 30 nS HIGH 50.000 % ;
0 items analyzed, 0 timing errors detected.
-----------------------------------------------------------
The original PERIOD constraint reports 0 items analyzed. However, TRCE/TA creates another PERIOD constraint for each DLL output based upon the original PERIOD. Each of the new PERIOD constraints is adjusted depending on the output. For example a 30ns PERIOD on the input is changed to a 15ns PERIOD on the 2X output.
=======================================================================
Timing constraint: PERIOD * 2 analysis
for net "TWOTIME" derived from
NET "PADCLKIN" PERIOD = 30
ns HIGH 50.000 % ;
144 items analyzed, 0 timing errors
detected.
Minimum period is 9.015ns.
-----------------------------------------------------------------------
Slack: 5.985ns path PADCE to &__A__80
relative to
15.000ns delay constraint
Using the DLL output net name method:
=======================================================================
Timing constraint: TS_TWOTIME = PERIOD
TIMEGRP "TWOTIME" 30 ns HIGH 50.0%;
348 items analyzed, 141 timing errors
detected.
Minimum period is 14.690ns.
-----------------------------------------------------------------------
Slack: -7.112ns path &__A__70 to
U3/BU3 relative to
10.131ns skew between &__A__70
and U3/BU3
Note: If the CLKDV output is used with a division factor (CLKDV_DIVIDE) of 1.5 or 2.5, then a PERIOD based upon the CLKDV output net must be used. Timing Engine does not properly propagate PERIOD constraints in this situation.
The CLKDLL provides duty cycle correction on all 1x clock
outputs such that all 1x outputs by default have a 50/50 duty cycle. The DUTY_CYCLE_CORRECTION
property (TRUE by default), controls this feature. This should be kept in mind
when creating period constraints based upon the DLL outputs.
For example:
Original Constraint: NET "ZERO" PERIOD = 30 ns HIGH 7 ns;
Modified Constraint: NET "ZERO" PERIOD = 30 ns HIGH 15 ns;
The modified constraint accounts for the duty cycle correction. Duty cycle correction also occurs on the 2x and DV outputs. This correction can not be controlled by the property.
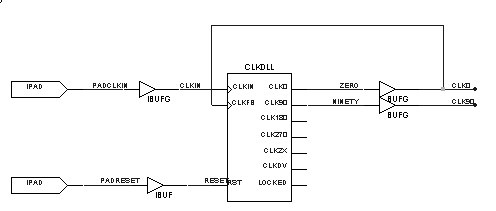
Figure 2.CLKDLL Implementation
When creating pad-to-setup requirements, care should be taken to incorporate any phase or PERIOD adjustment factor into the value specified for an OFFSET IN constraint.

Figure 3. Schematic Layout
For example: If your register is clocked by the net from the CLK90 pin of the DLL which has a PERIOD of 20ns, then the OFFSET value should be adjusted by an additional 5 ns.
Original Constraint: NET "PAD_IN" OFFSET
= IN 10 BEFORE "PADCLKIN";
Modified Constraint: NET "PAD_IN" OFFSET =
IN 15 BEFORE "PADCLKIN";
NOTE: The clock net name required for OFFSET constraints is
the clock net name attached to the IPAD. In this case it is PADCLKIN not CLK90,
refer to fig 2 for the clk network.
When creating clock-to-pad requirements, care should be taken to incorporate any phase or PERIOD adjustment factor into the value specified for an OFFSET OUT constraint. For example: If your register is clocked by the net from the CLK90 pin of the DLL which has a PERIOD of 20ns, then the OFFSET value should be adjusted by 5 ns less than the original constraint.
Original Constraint: NET "PAD_OUT" OFFSET
= OUT 15 AFTER "PADCLKIN";
Modified Constraint: NET "PAD_OUT"
OFFSET = OUT 10 AFTER "PADCLKIN";

Figure 4. FROM TO Schematic.
When using PERIOD constraints, the user must properly constrain
the paths between multiple clock domains. Refer to figure 4. If a PERIOD constraint
is applied to the CLK90 and CLK0 output pins of the DLL, the CLK0 PERIOD constraint
will constrain the paths between flip-flop A and B. This type of constraining
can lead to setup violations. Consider the waveforms in figure 5. Because of
the phase shift between CLK90 and CLK0, the path from A to B has 25% less time
than the PERIOD constraint allows. To properly constrain these paths use a FROM
TO constraint.
For Example:
NET "CLK90" TNM_NET = "CLK90";
NET "CLK0" TNM_NET = "CLK0";
TIMESPEC
"TS_CLK90_2_CLK0" = FROM "CLK90" TO "CLK0"
15ns;
The TIMESPEC is set at 15ns because the PERIOD on CLK0 is 20ns.
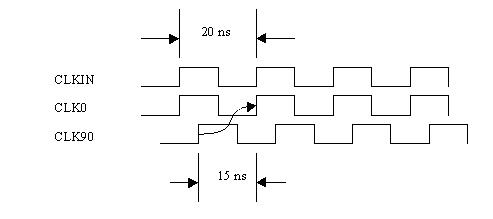
Figure 5. Waveform illustration of CLKIN, CLK0, and CLK90.
This type of correction is required for all clock domain interactions.
The following table contains the some of the possible configurations and the
associated corrections.
CLKDLL |
Required Correction |
CLK0 to CLK90 |
Subtract 75% |
CLK0 to CLK180 |
Subtract 50% |
CLK0 to CLK270 |
Subtract 25% |
CLK270 to CLK0 |
Subtract 75% |
CLK270 to CLK90 |
Subtract 50% |
CLK270 to CLK180 |
Subtract 25% |
The Constraints Editor handles constraints specific to the CLKDLL in the following way.
PERIOD:
The Constraint Editor creates PERIOD constraints based upon the DLL output name method. Care still needs to be taken with respect to duty cycle correction, multiplication, and division.
PAD to SETUP and CLOCK to PAD:
When creating pad or register specific OFFSET constraints in the Constraints Editor the user must specify the clock pad net name for flip-flops driven by the CLKDLL. In figure 1, PADCLKIN is the pad net name used in OFFSET constraints.
FROM:TO:
Groups can be created based upon the DLL outputs and used to create timespecs to control multiple clock domain paths.
Copyleft Chang-woo,YANG